Christian Ott ‒ ng808
Helmholtz Young Investigators Group (NG808)
for „Dynamic Control of Legged Humanoid Robots”
supported by the Initiative and Networking Fund of the Helmholtz Association (HGF), the German Aerospace Center (DLR e.V.), and the Technical University of Munich (TUM).
Funding period: 12/2011-11/2016
Scope of the Research Group
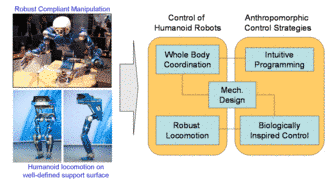
This Helmholtz Young Investigators Group project, titled “Dynamic Control of Legged Humanoid Robots”, covers key aspects of humanoid robot control by focusing on advanced motion skills for locomotion and physical interaction.
During the last 20 years, control applications in robotics research have been extended from the control of fully actuated serial- and closed-chain manipulator systems to larger systems of increased complexity including mechanical systems with non-holonomic constraints, under-actuation in the control input, and varying contact constraints leading to hybrid dynamical systems. Today, biped humanoid robots serve as an important application field of robot control in which all the above mentioned control problems appear at the same time.
While basic walking control solutions for bipedal robots have been developed based on simplified models, these approaches still lack in robustness with respect to the environment model, e.g. the foot ground contact, and do not allow a generalization to the full dynamical model. Robust bipedal walking is a key element if one seriously considers employing humanoid robots as our mechanical servants in domestic living environments. In this project, walking control algorithms will be developed, which allow for a real-time step adaptation and thus an online adaptation to the environmental conditions.
Compliant whole body motion controlis a must both for physical interaction with humans and for autonomous manipulation. In particular, when considering robots within the direct surroundings of humans, the problem of handling intentional and unintentional physical interaction with humans during standing as well as during locomotion has to be mastered. While state of the art humanoid robots are able to fulfil a large range of controlled motions in well defined environments, nowadays locomotion control approaches focus on static environments and consider no or only minimal physical interaction with humans. In this project, we aim not only at reactive skills to physical contact enforced by a human, but moreover also consider active physical human robot interaction initiated and performed by the robot.
Walking skills between robots and humans differ not only in the control, but also in the physical basis. Biomechanics research has found the existence of stable walking motions based on simple, but human oriented, compliant models. While these works focus on basic principles of bipedal locomotion, the utilization of these principles for robot control is a still widely open topic. This project aims at transferringanthropomorphic walking principles to robotic systemsin order to make considerable progress in the performance of robotic walking. This expected increase in performance can be evaluated in quantitative terms like speed or energy consumption, as well as in the qualitative achievement of advanced locomotion modes like running or jumping. The utilization of anthropomorphic walking principles will involve the design of new hardware platforms as well as control oriented research within the Helmholtz Young Investigators Research Group.
A more explicit skill transfer from the human to robots becomes interesting for highly articulated humanoid robots with a large number of degrees-of-freedom. Here, teaching by demonstration provides a means to generate human-like motion behaviour, without being too sensitive to specific optimization criteria. Within this project, learning of human motion skills will focus on locomotion and force based manipulation skills. Since biped balancing and locomotion is an inherently unstable process, this requires an extension from pure imitation of the human’s motions to an ‘emulation’ of the locomotion skill.
The above-mentioned topics represent a control oriented selection of motion skills for humanoid robots, with the focus on locomotion and physical whole-body interaction.
Research Topics
- Bipedal walking
- Force and impedance control for bipedal robots
- Multi-contact interaction
- Biologically inspired walking
- Optimization based gait generation
Robots
 |
 |
 |
|
DLR-Biped (2010-2012) |
TORO, preliminary version (2012) |
TORO (TOrque controlled humanoid RObot) (2013) |
Members:
- Dr. Christian Ott (group leader): Impedance control
- Dr. Maximo A. Roa Garzon (post-doctoral researcher): Force distribution, balancing, manipulation
- Johannes Englsberger (PhD student): Bipedal walking, Capture Point
- Gianluca Garofalo (PhD student): SLIP model, biologically inspired walking
- Alexander Werner (PhD student): Optimization based gait generation
- Bernd Henze (PhD student): Multi-contact control
Previous Members:
- Dr. Andrei Herdt (post-doctoral researcher): MPC based walking control, 06/2012-02/2013
Visitors:
- Aurelien Ibanez, UPMC, 06/2014-10/2014.
- Akihiro Kawamura, Kyushu University, 06/2012-12/2012
- Tadej Petric, Jozef Stefan Institute, 08/2012-12/2012
- Dr. Hiroshi Kaminaga, University of Tokyo, 01/2012-03/2012
- Dr. Nicholas Perrin, IIT, 11/2011-02/2012
- Dr. Olivier Stasse, LAAS, 11/2011-12/2011
- Dr. Yuto Nakanishi, University of Tokyo 08/2011-11/2011
Contact
Dr.-Ing. Christian Ott
Institute of Robotics and Mechatronics
German Aerospace Center (DLR e.V.)
82234 Wessling, Germany
Tel.: +49/(0)8153-28-3464
email: christian.ott<at>dlr.de
Projects/Funding
- Helmholtz Initiative and Networking Funds
- German Aerospace Center (DLR e.V.)
- Technical University of Munich (TUM), Institute of Cognitive Systems (ICS)
- DAAD Procope
![]()
![]()

Press Releases
- DLR-press release of the robot TORO, 25.03.2013
- Article about TORO in the Helmholtz Newsletter 'hermann', April 2013
Publications
Journal publications
- G. Garofalo, Ch. Ott, Limit Cycle Control Using Energy Function Regulation with Friction Compensation, IEEE Robotics and Automation Letters, accepted for publication.
- Ch. Ott, B. Henze, G. Hettich, T. N. Seyde, M. A. Roa, V. Lippi, T. Mergner, Comparison of bio-inspired and model-based approaches for posture control of humanoid robots, IEEE Robotics and Automation Magazine, accepted for publication.
- J. Englsberger, Ch. Ott, A. Albu-Schäffer, Three-dimensional bipedal walking control based on Divergent Component of Motion, IEEE Transactions on Robotics (TRO), accepted, 2015.
- T. Petric, L. Žlajpah, G. Garofalo and Ch. Ott, Walking with Adaptive Oscillator and Dynamic Movement Primitives, accepted for publication in International Journal of Mechanics and Control (JoMaC), 2014.
- J. Englsberger and Ch. Ott, Walking stabilization for humanoid robots based on control of the Capture Point, at-Automatisierungstechnik, Oldenbourg Wissenschaftsverlag, pp. 692-703, 11/2012.
- Ch. Ott, O. Eiberger, J. Englsberger, M. A. Roa, and A. Albu-Schäffer, Hardware and Control Concept for an Experimental Bipedal Robot with Joint Torque Sensors, Journal of the Robotics Society of Japan, Vol. 30, No. 4, pp. 378-382, May 2012.
Book Chapters
- M. A. Roa and Ch. Ott, Balance and Posture Control for Biped Robots, Chapter 8 in Multibody System Dynamics, Robotics, and Control, X, H. Gattringer and J. Gerstmayr (Eds.), Springer Verlag, pp. 129-144, 2013.
Conference publications
-
Biologically Inspired Deadbeat control for running on 3D stepping stones
Johannes Englsberger, Pawel Kozlowski, Christian Ott, IEEE-RAS International Conference on Humanoid Robots, 2015.
accepted for presentation at IEEE-RAS International Conference on Humanoid Robots 2015 - Johannes Englsberger, Pawel Kozlowski, Christian Ott, Biologically Inspired Dead-beat controller for bipedal running in 3D, accepted for publication at IROS 2015.
- Kai Hu, Christian Ott, Dongheui Lee, Online Iterative Learning Control of Zero-Moment Point for Biped Walking Stabilization, accepted for publication at ICRA 2015.
- G. Garofalo, J. Englsberger, Ch. Ott, On the regulation of the energy of elastic joint robots: excitation and damping of oscillations, ACC 2015
- G. Garofalo, B. Henze, J. Englsberger, Ch. Ott, On the inertially decoupled structure of the floating base robot dynamics, MATHMOD 2015
- A. Werner, R. Lampariello, Ch. Ott, Trajectory Optimization for Walking Robots with Series Elastic Actuators, CDC 2014
- Ch. Ott, B. Henze, and D. Lee, Kinesthetic teaching of humanoid motion based on whole-body compliance control with interaction-aware balancing, accepted for publication at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2013.
- G. Garofalo, Ch. Ott, and A. Albu-Schäffer, On the closed form computation of the dynamic matrices and their differentiations, accepted for publication at IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2013.
- J. Englsberger, Ch. Ott, A. Albu-Schäffer, Three-dimensional bipedal walking control using Divergent Component of Motion, accepted for publication at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2013.
- T. Petric and L. Zlajpah and G. Garofalo and Ch. Ott, Walking Control Using Adaptive Oscillators Combined with Dynamic Movement Primitives, accepted for publication at International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD) 2013.
- G. Garofalo, Ch. Ott, and A. Albu-Schäffer, Orbital stabilization of mechanical systems through semidefinite Lyapunov functions, accepted for publication at ACC 2013.
- D. Lakatos, G. Garofalo, F. Petit, Ch. Ott, and A. Albu-Schäffer, Modal Limit Cycle Control for Variable Stiffness Actuated Robots, accepter for publication at ICRA 2013.
- H. Kaminaga, J. Englsberger, and Ch. Ott, Kinematic Optimization and Online Regeneration of Swing Foot Trajectory for Biped Locomotion, accepted for publication at HUMANOIDS 2012.
- J. Englsberger and Ch. Ott, Integration of vertical COM motion and angular momentum in an extended Capture Point tracking controller for bipedal walking, accepted for publication at HUMANOIDS 2012.
- H. Kaminaga, J. Englsberger, and Ch. Ott, 二足歩行の歩行能力を向上するための遊脚軌道最適化およびオンライン軌道修正, 30th Annual Conference of the Robotics Society of Japan 2012.
- A. Werner, R. Lampariello, and Ch. Ott, Optimization-based generation and experimental validation of optimal walking trajectories for biped robots, accepted for publication at IROS 2012.
- M. Krause, J. Englsberger, P.-B. Wieber, and Ch. Ott, Stabilization of the Capture Point Dynamics for Bipedal Walking based on Model Predictive Control, 10th IFAC Symposium on Robot Control - SYROCO, pp. 165-171, 2012.
- G. Garofalo, Ch. Ott, and A. Albu-Schäffer, Walking control of fully actuated robots based on the Bipedal SLIP model, IEEE International Conference on Robotics and Automation 2012, pp. 1456-1463, St. Paul/Minnesota/USA.
- Ch. Ott, M. Roa, and G. Hirzinger, Posture and Balance Control for Biped Robots based on Contact Force Optimization, Best paper Award at IEEE-RAS International Conference on Humanoid Robots 2011, pp. 26-33, Bled/Slovenia.