Alejandro Fontan Villacampa ‒ IDNav
IDNav 
IDNav is a real-time library for Information-Driven Navigation.
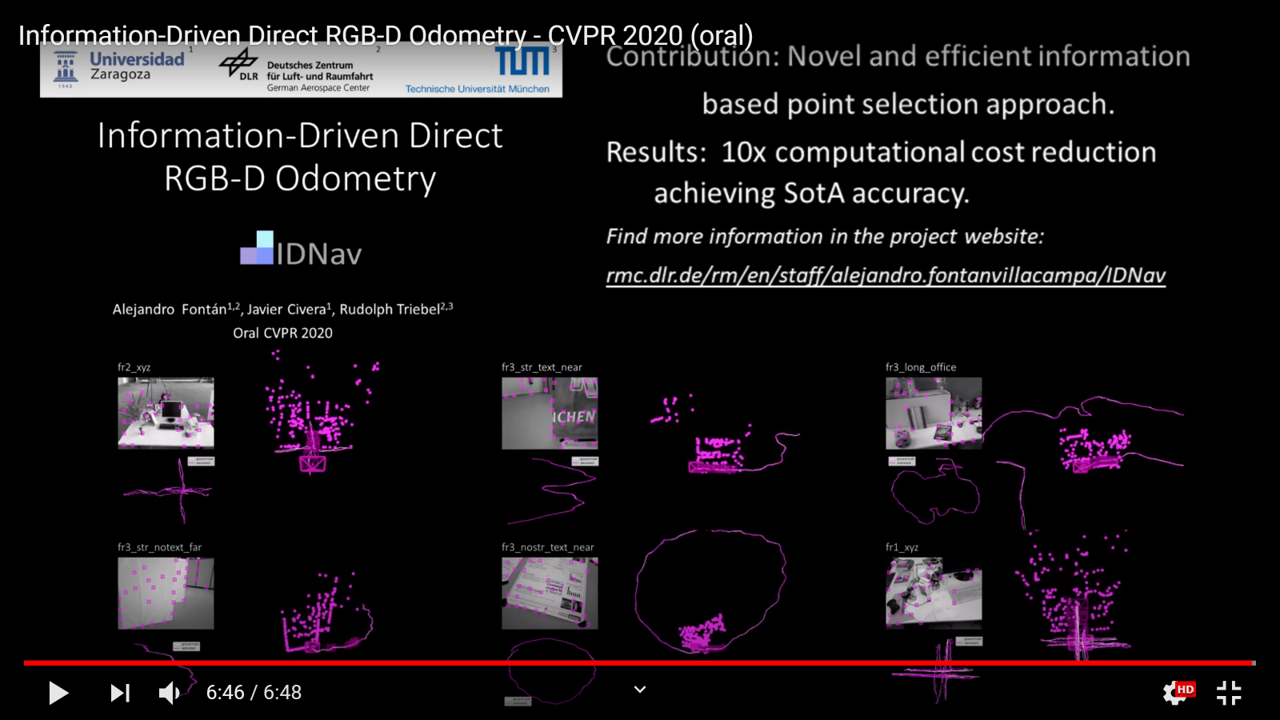
IDVO for RGB-D cameras computes the camera trajectory and a sparse 3D reconstruction. We provide examples to run the odometry system in the TUM
Related Publications:
-
[RGB-D Odometry] Information-Driven Direct RGB-D Odometry (A. Fontán, J. Civera, R. Triebel), IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020. (Oral presentation). Paper
 BibTeX entry
BibTeX entry
Last updated on Thursday, 26 November 2020 by Alejandro Fontan Villacampa