Staff

DLR German Aerospace Center
Institute of Robotics and Mechatronics
Autonomy and Teleoperation
Oberpfaffenhofen
Muenchener Str. 20
82234 Wessling
| telephone: | +49 8153 28-2441 |
| email: | Dr. Roberto Lampariello |
Fields of Interest:
- Orbital Robotics
- Nonlinear Optimization for Trajectory Generation
- Multibody Dynamics
- Applied Nonlinear Control
- Active Debris Removal and Orbital Sustainability
- Robot Autonomy
Principal Projects:
- 2023-2025: ION (DLR) to develop technologies in debris characterization, ground segment, GNC, robotics, analysis and testing in simulation and with hardware-in-the-loop facilities, for sustainability development in the orbital environment - see ION.
- 2023-2024: ORU-BOAS (EU) to provide an on-ground experimental robotic facility for testing docking procedures between two actuated spacecraft equipped with dedicaded advanced docking interfaces - see https://oru-boas.eu/
- 2019-2022: TumbleDock/ROAM (DLR/MIT/NASA) to test a robust observation, planning, and control pipeline for autonomous rendezvous with tumbling targets using two ASTROBEE robots on the the ISS. See DLR Press Release, NASA ROAM, MIT News, Media Inaf, IEEE Spektrum and papers Albee et al, Frontiers 2021, Albee et al, ASTRA 2022 and Specht, et al, JGCD 2023 below.
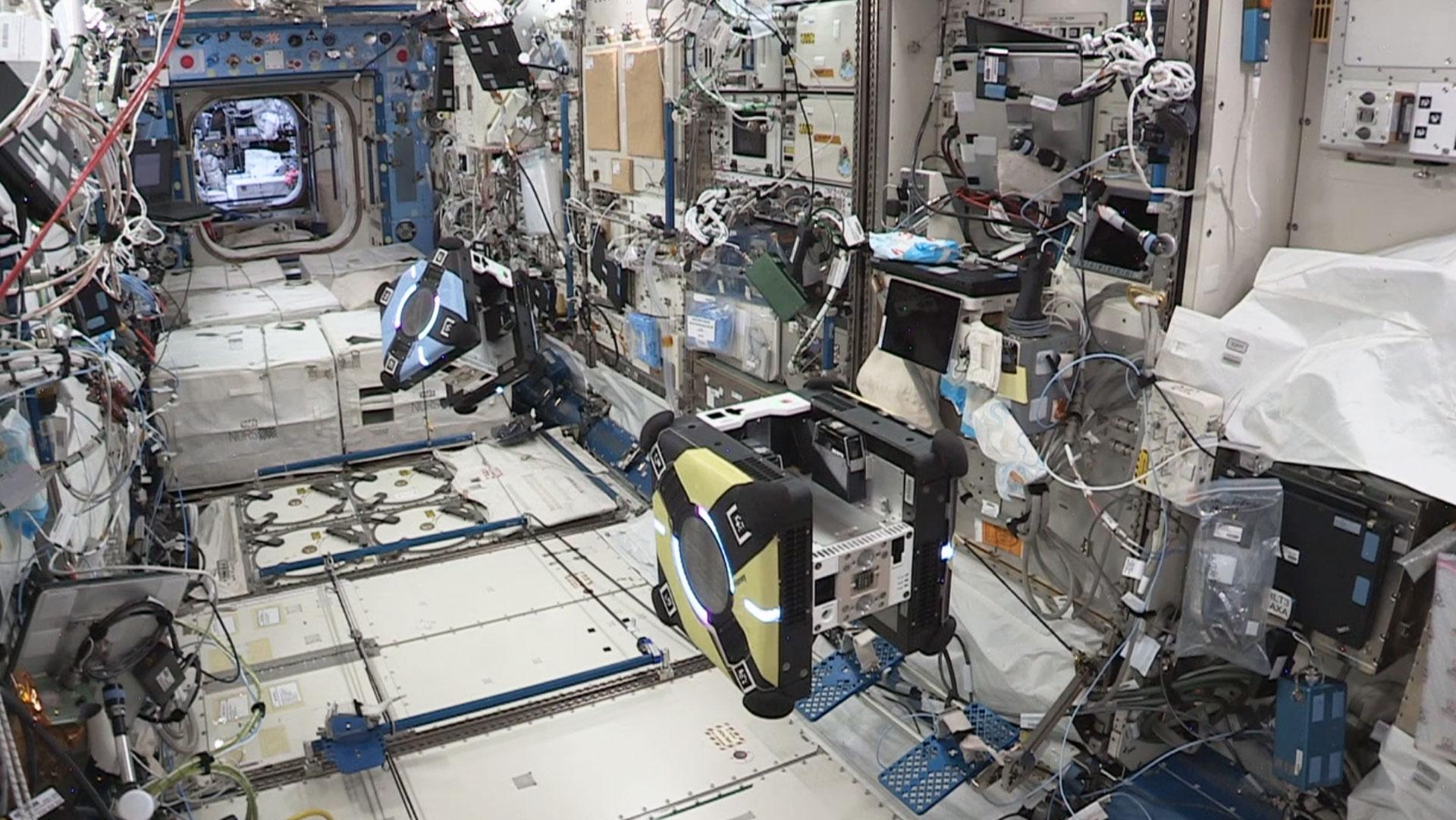
Fig.: (Top) Simulation scenario with Chaser-Astrobee (left) and Target-Astrobee with appendages (right)(credit DLR); (Bottom) Experiments with Chaser-Astrobee (front) and Target-Astrobee (back) on the ISS (credit NASA).
- 2017-19: COMRADE (ESA) for the development of a combined satellite-robot controller.
- 2017-19: FACILITATORS (EU, PERASPERA) to provide the OOS-SIM facility (see below) as a validation platform for on-ground testing of other PERASPERA grant products.
- 2015-16: e.deorbit phase B1 (ESA) for the post-life disposal of ESA’s environmental satellite ENVISAT by means of a free-flying robot.

Fig.: ENVISAT satellite
- 2008-2014: DEOS - Deutsche Orbitale Servicing Mission (DLR) - development of the tools for the capture, stabilization and de-orbiting of a non co-operative target by means of a free-flying robot.

Fig.: DEOS scenario: (left) a robot mounted on a chaser satellite grasping a non-cooperative tumbling satellite; (right) experimental setup OOS-SIM at DLR
- 2011-2014: FORROST - Robotische On-Orbit-Servicing Technologien (Bayerische Forschungsstiftung) - development of robotic on-orbit technologies. See Lampariello et al, 2015 below.
- 2003- 2007: TECSAS - Technology Satellite(s) for demonstration and Verification of Space Systems (DLR/CSA/Babakin) - development of the tools for the capture, stabilization and de-orbiting of a non co-operative target by means of a free-flying robot.
- 2002: ROGER - Robotic Geostationary Robotic Restorer - Feasibility study (ESA) - study for the de-orbiting of a non co-operative geostationary satellite by means of a tether-net and a tether-gripper satellite system.
- 1998-99: GETEX (DLR/NASDA)- German-Japanese Space Telerobotics Experiment: path planning of maneuvers performed with the manipulator on board of the ETS-7 satellite; evaluation of the experimental data for a model update of the ETS-7 free-floating satellite.
Teaching:
SS23: On-orbit Dynamics and Robotics, TU Munich.
SS22: On-orbit Dynamics and Robotics, TU Munich.
SS18: On-orbit Dynamics and Robotics, TU Munich.
SS17: On-orbit Dynamics and Robotics, TU Munich.
SS16: On-orbit Dynamics and Robotics, TU Munich.
SS15: On-orbit Dynamics and Robotics, TU Munich.
SS14: On-orbit Dynamics and Robotics, TU Munich.
SS13: On-orbit Dynamics and Robotics, TU Munich.
SS12: On-orbit Dynamics and Robotics, TU Munich.
Publications:
Journal Papers:
- C Specht, A Bishnoi, R Lampariello, "Autonomous Spacecraft Rendezvous Using Tube-Based Model Predictive Control: Design and Application", Journal of Guidance, Control and Dynamics, 2023, https://doi.org/10.2514/1.G007280.
-
Albee, K., Oestreich, C., Specht, C., Teran Espinoza, A., Todd, J., Hokaj, I., Lampariello, R., Linares, R., "A Robust Observation, Planning, and Control Pipeline for Autonomous Rendezvous with Tumbling Targets", Frontiers in Robotics and AI, Vol. 8, September 2021,
https://doi.org/10.3389/frobt.2021.641338. -
Papadopoulos, E., Aghili, F., Ma, O., Lampariello, R., "Robotic Manipulation and Capture in
Space: A Survey", Frontiers in Robotics and AI, Vol. 8, July 2021. https://doi.org/10.3389/frobt.2021.686723. - Lampariello, R., Mishra, H., Oumer, N. W., Peters, J., "Robust Motion Prediction of a Free-Tumbling Satellite with On-Ground Experimental Validation", Journal of Guidance, Control and Dynamics, Vol. 44, No. 10 (2021), pp. 1777-1793 doi: doi/abs/10.2514/1.G005745
- De Stefano, M., Mishra, H., Giordano, A. M., Lampariello, R., Ott, C., "A Relative Dynamics Formulation for Hardware-in-the-Loop Simulation of On-Orbit Robotic Missions". IEEE Robotics and Automation Letters, 6(2), 2021. DOI: 10.1109/LRA.2021.3064510.
- M. De Stefano, H. Mishra, R. Balachandran, R. Lampariello, C. Ott, C. Secchi, "Multi-rate Tracking Control for a Space Robot on a Controlled Satellite: a Passivity-based Strategy", IEEE Robotics and Automation Letters, 4(2), 2019. DOI: 10.1109/LRA.2019.2895420
- R. Lampariello, H. Mishra, N. Oumer, P. Schmidt, M. De Stefano, A- Albu-Schaeffer, "Tracking Control for the Grasping of a Tumbling Satellite with a Free-Floating Robot", IEEE Robotics and Automation Letters, 3(2), 2018. DOI: 10.1109/LRA.2018.2855799
- S. Jaekel, R. Lampariello, W. Rackl, M. De Stefano, N. Oumer, A. M. Giordano, O. Porges, M. Pietras, B. Brunner, J. Ratti, Q. Muehlbauer, M. Thiel, S. Estable, R. Biesbroek and A. Albu-Schaeffer, ''Design and Operational Elements of the Robotic Subsystem for the e.Deorbit Debris Removal Mission", Frontiers in Robotics and AI, Vol. 5, 2018. https://doi.org/10.3389/frobt.2018.00100.
- Agrawal, S.K., Pathak, K., Franch, J., Lampariello, R., Hirzinger, G., "A Differentially Flat Open-Chain Space Robot with Arbitrarily Oriented Joint Axes and Two Momentum Wheels at the Base", IEEE Transactions on Automatic Control, Volume 54, Issue 9, Sept. 2009, pp. 2185 - 2191. DOI: 10.1109/TAC.2009.2026836.
Conference Papers:
- K. Albee, C. Specht, H. Mishra, C. Oestreich, B. Brunner, R. Lampariello, R. Linares, "Autonomous Rendezvous with an Uncertain, Uncooperative Tumbling Target: the TumbleDock Flight Experiments", 16th Symposium on Advanced Space Technologies in Robotics and Automation (ASTRA 2022), Noordwjik, The Netherlands, 2022.
- D. Calzolari, R. Lampariello, and A. Giordano, “Singularity maps of space robots and their application to gradient-based trajectory planning,” in Robotics: Science and Systems (RSS), July 2020.
- Mishra, H., Giordano, A. M., De Stefano, M., Lampariello, R., Ott, C. (2020). "Inertia-Decoupled Equations for Hardware-in-the-Loop Simulation of an Orbital Robot with External Forces". In 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 1879-1886).
- H. Mishra, M. De Stefano, A. M. Giordano, , R. Lampariello, and C. Ott, “A geometric controller for fully-actuated robotic capture of a tumbling target,” in 2018 Annual American Control Conference (ACC), IEEE, July 2020.
- C. Specht, M. Gerdts, and R. Lampariello, “Neighborhood estimation in sensitivitybased update rules for real-time optimal control in robotics,” in European Control Conference (ECC), May 2020. Best student paper award.
- A. Poó Gallardo, H. Mishra, A. Giordano, Roberto Lampariello, "Robust Estimation of Motion States for Free-Floating Tumbling Target Capture", EEE Aerospace Conference, Big Sky, Montana, USA, March 2019.
- C. Buckner, R. Lampariello, “Tube-based Model Predictive Control for the Approach Maneuver of a Spacecraft to a free-tumbling Target Satellite”, ACC 2018, Milwaukee, USA, June 2018.
- Wolfgang Rackl, Jens Gerstmann, Roberto Lampariello, “Analysis of liquid fuel sloshing on free-floating robot dynamics under low-gravity condition”, IEEE Aerospace Conference, Big Sky, Montana, USA, March 2018.
- Pedro Rodriguez Perez, Marco De Stefano, Roberto Lampariello, “Velocity Matching Compliant Control for a Space Robot during Capture of a Free-Floating Target”, 2018 IEEE Aerospace Conference, Big Sky, Montana, USA, March 2018.
- J. Telaar, I. Ahrns, S. Estable, W. Rackl, M. De Stefano, R. Lampariello, N. Santos, P. Serra, M. Canetri, F. Ankersen, J. Gil-Fernandez, "GNC architecture for the e.Deorbit mission ", 7th European Conference for Aeronautics and Space Science (EUCASS), Milan, Italy, July 2017.
- Juergen Telaar, Stephane Estable, Marco De Stefano, Wolfgang Rackl, Roberto Lampariello, Finn Ankersen, Jesus Gil Fernandez, " Coupled control of chaser platform and robot arm for the e.deorbit mission", GNC 2017: 10th International ESA conference on Guidance, Navigation & Control Systems, Salzburg, Austria, May 2017.
- Stoneman, S., Lampariello, R., "A Nonlinear Optimization Method to Provide Real-Time Feasible Reference Trajectories to Approach a Tumbling Target Satellite", International symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS 2016), Beijing, P. R. China, June 2016.
- Jordi Artigas, Ribin Balachandran, Marco De Stefano, Michael Panzirsch, Jan Harder, Juergen Letschnik, Roberto Lampariello, Alin Albu-Schaeffer, “Teleoperation for On-Orbit Servicing Missions through the ASTRA Geostationary Satellite”, IEEE Aerospace Conference, Big Sky, Montana, USA, March 2016.
- Werner, A., Trautmann, D., Lee, D. Lampariello, R., “Generalization of Optimal Motion Trajectories for Bipedal Walking”, IEEE/RSJ International Conference on Intelligent Robots and Systems 2015 (IROS 15), Hamburg, Germany, Sept. 28-Oct. 2 2015.
-
Jordi Artigas, Marco De Stefano, Wolfgang Rackl, Roberto Lampariello, Bernhard Brunner,
Wieland Bertleff, Robert Burger, Oliver Porges, Alessandro Giordano, Christoph Borst, Alin Albu-Schaeffer, "The OOS-SIM: An On-ground Simulation Facility For On-Orbit Servicing Robotic Operations", IEEE International Conference on Robotics and Automation 2015 (ICRA 2015) Seattle, USA, May 2015. - Marco De Stefano, Jordi Artigas, Alessandro Giordano, Roberto Lampariello, and Alin Albu-Schaeffer, "On-Ground Experimental Verification of a Torque Controlled Free-floating Robot", ESA Workshop on Advanced Space Technologies for Robotics and Automation (ASTRA 2015), ESTEC, Noordwijk, NL, May 2015.
- Steffen Jaekel, Roberto Lampariello, Giorgio Panin, Mikel Sagardia, Bernhard Brunner, Oliver Porges, and Erich Kraemer, Matthias Wieser, Richard Haarmann, and Markus Pietras, Robin Biesbroek, "Robotic Capture and De-Orbiting of a Heavy, Uncoopertive and Tumbling Target Satellite in Low Earth Orbit", ESA Workshop on Advanced Space Technologies for Robotics and Automation (ASTRA 2015), ESTEC, Noordwijk, NL, May 2015.
- Lampariello, R., J. Artigas, N. W. Oumer, W. Rackl, G. Panin, R. Purschke, J. Harder, U. Walter, J. Frickel, I. Masic, K. Ravandoor, J. Scharnagl, K. Schilling, K. Landzettel, G. Hirzinger,“FORROST: Advances in On-Orbit Robotic Technologies”, IEEE Aerospace Conference, Big Sky, Montana, USA, March 2015.
- Werner, A., Lampariello, R., Ott, C., “Trajectory Optimization for Walking Robots with Series Elastic Actuators”, IEEE 53rd Annual Conference on Decision and Control (CDC), Los Angeles, California, USA, December 2014.
- Stoneman, S., Lampariello, R., “Embedding Nonlinear Optimization in RRT* for Optimal Kinodynamic Planning”, IEEE 53rd Annual Conference on Decision and Control (CDC), Los Angeles, California, USA, December 2014.
- Rackl, W. and Lampariello, R., "Parameter Identification of Free-Floating Robots with Flexible Appendages and Fuel Sloshing", 6th International Conference on Modelling, Identification and Control, Melbourne, Australia, 3-5 December 2014.
- Hirano, D., Fujii, Y., Abiko, S., Lampariello, R., Nagaoka, K., Yoshida, K., "Simultaneous Control for End-Point Motion and Vibration Suppression of a Space Robot Based on Simple Dynamic Model", IEEE International Conference on Robotics and Automation 2014 (ICRA 2014), Hong Kong, China, June 2014.
- Lampariello, R., Hirzinger, G., "Generating Feasible Trajectories for Autonomous On-Orbit Grasping of Spinning Debris in a Useful Time", IEEE/RSJ International Conference on Intelligent Robots and Systems 2013 (IROS 13), Tokyo, Japan, November 2013.
- Hirano, D., Fujii, Y., Abiko, S., Lampariello, R., Nagaoka, K., Yoshida, K., "Vibration Suppression Control of a Space Robot with Flexible Appendages Based on Simple Dynamic Model", IEEE/RSJ International Conference on Intelligent Robots and Systems 2013 (IROS 13), Tokyo, Japan, November 2013.
- Lampariello, R., "On Grasping a Tumbling Debris Object with a Free-Flying Robot (invited paper)", 19th IFAC Symposium on Automatic Control in Aerospace, Wurzburg, Germany, September 2013.
- Rackl, W., Lampariello, R., "Parameter Identification Methods for Free-Floating Space Robots with Direct Torque Sensing", 19th IFAC Symposium on Automatic Control in Aerospace, Wurzburg, Germany, September 2013.
- Gahbler, P., Lampariello, R., Sommer, J., "Analysis of a Deorbiting Maneuver of a Large Target Satellite Using a Chaser Satellite with a Robot Arm", ASTRA 2013, ESTEC, Holland, May 2013.
- Werner, A., Lampariello, R., Ott, C., "Optimization-based generation and experimental validation of optimal walking trajectories for biped robots", IEEE/RSJ International Conference on Intelligent Robots and Systems 2012 (IROS 12), Vilamoura, Algarve, Portugal, October 2012.
- Zebenay, M., Lampariello, R., Boge, T. and Choukroun D., "A new contact dynamics model tool for hardware-in-the-loop docking simulation", 11th International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS 2012), Turin, Italy, 2012.
- Rackl, W. , Lampariello, R., Hirzinger, G., "Robot Excitation Trajectories for Dynamic Parameter Estimation using Optimized B-Splines", International Conference on Robotics and Automation 2012 (ICRA 2012), St. Paul, Minnesota, 2012.
- Lampariello, R., Nguyen-Tuong, D., Castellini, C., Hirzinger, G., Peters, J., "Trajectory planning for optimal robot catching in real-time", International Conference on Robotics and Automation 2011 (ICRA 2011), Shanghai, China, May 2011.
- Lampariello, R., "Motion Planning for the On-orbit Grasping of a Non-cooperative Target Satellite with Collision Avoidance", 10th International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS 2010), Sapporo, Japan, 2010.
- Abiko, S., Lampariello, R., Hirzinger, G., "A Dynamic Library for Versatile Modeling of Free-Flying and Mobile Robotic Systems", 10th ESA Workshop on Advanced Space Technologies for Robotics and Automation (ASTRA), ESA/ESTEC Noordwijk, The Netherlands, November 2008.
- R. Lampariello, S. Abiko, G. Hirzinger, Dynamic Modeling of Structure-Varying Kinematic Chains for Free-Flying Robots, International Conference on Robotics and Automation 2008 (ICRA 08), Pasadena, California, May 2008.
- S. Abiko, R. Lampariello, G. Hirzinger, Impedance Control for a Free-Floating Robot in the Grasping of a Tumbling Target with Parameter Uncertainty, IEEE/RSJ International Conference on Intelligent Robots and Systems 2006 (IROS 06), Beijing, China, October 2006.
- R. Lampariello, J. Heindl, R. Koeppe, G. Hirzinger, Reactionless Control for two Manipulators Mounted on a Cable-Suspended Platform, IEEE/RSJ International Conference on Intelligent Robots and Systems 2006 (IROS 06), Beijing, China, October 2006
- S. Agrawal, K. Pathak, R. Lampariello, G. Hirzinger, Design of Differentially Flat Open-Chain Robots with Arbitrarily Oriented Joints and Two Momentum Wheels at the Base, International Conference on Robotics and Automation 2006 (ICRA 06), Orlando, Florida, May 2006.
- U. Hillenbrand, R. Lampariello, Motion and Parameter Estimation of a Free-Floating Space Object from Range Data for Motion Prediction, 8th International symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS 2005), Munich, Germany, 5-9 September 2005.
- R. Lampariello, G. Hirzinger, Modeling and Experimental Design for the On-Orbit Inertial Parameter Identification of Free-flying Space Robots, ASME 2005 International Design Engineering Technical Conferences & Computers Information in Engineering Conference, Long Beach, California, September 24-28, 2005.
- F. Cusumano, R. Lampariello, G. Hirzinger, Development of Tele-operation Control for a Free-floating Robot during the Grasping of a Tumbling Target, International Conference on Intelligent Manipulation and Grasping, Genoa - Italy July 1-2, 2004.
- K. Landzettel, B. Brunner, R. Lampariello, K. Preusche, D. Reintsema, G. Hirzinger, System prerequisites and operational modes of on-orbit servicing, ISTS (International Symposium on Space Technology and Science), Miyazaki, Japan, May 30 - June 6, 2004.
- R. Lampariello, S. Agrawal, G. Hirzinger, Optimal Motion Planning for Free-Flying Robots, International Conference on Robotics and Automation 2003 (ICRA 03), Taiwan, May 2003.
- R. Lampariello, G. Hirzinger, Freeflying robots - Inertial Parameter Identification and Control Strategies, ESA Workshop on Advanced Space Technologies for Robotics and Automation (ASTRA 2000), ESTEC, Noordwijk, NL, December 2000.
- K. Landzettel, B. Brunner, G. Hirzinger, R. Lampariello, G. Schreiber, B.-M. Steinmetz, A Unified Ground Control and Programming Methodology for Space Robotics Applications - Demonstrations on ETS-VII, International Symposium on Robotics (ISR 2000), pp. 422-427, Montreal, Canada, May 2000.
- G. Hirzinger, B. Brunner, R. Lampariello, K. Landzettel, J. Schott, B.-M. Steinmetz, Advances in Orbital Robotics (~ 22 MB), IEEE International Conference on Robotics and Automation (ICRA), Vol. 1, pp. 898-907, San Francisco, CA, April 2000.
- K. Landzettel, B.Brunner, K. Deutrich, R. Lampariello, G. Schreiber, B. Steinmetz, DLR / NASDA's Joint Robotics Experiments on ETS VII, ETS VII Symposium, Tokyo, Japan, March, 2000.
Videos:
- Haddadin, S., Huber, F., Krieger, K., Weitschat, R., Albu-Schäffer, A., Wolf, S., Friedl, W., Grebenstein, M., Petit, F., Reinecke, J., Lampariello, R., "Intrinsically Elastic Robots: The Key to Human Like Performance", Best IROS Video Award, IROS 2012.
Books:
- Yoshida, K., Wilcox, B. H., Hirzinger, G., Lampariello, R., Springer Handbook of Robotics, Chapter “Space Robotics”, 2nd edition, 2016.
Workshops, Symposia, Talks:
- Talk: "Robotic Spacecraft Rendezvous with a Tumbling Target for Capture: Robust Methods for Planning and Control", Plateau de Saclay Automatic Control Seminar, Laboratory of Signals and Systems (L2S), Paris-Saclay, March 2024.
- Talk: "Robotic Spacecraft Rendezvous with a Tumbling Target for Capture: Robust Methods for Planning and Control", Prisma Lab, University of Naples Federico II, May 2023.
- Talk: "Technological Trends in Orbital Robotics at the DLR", X-Laboratory Rotterdam, May 2022.
- Talk: "Towards Autonomous Operations in Robot On-Orbit Servicing", Chair for Flight Mechanics, Aerospace Science & Technology Department, Politecnico di Milano, December 2021.
- Talk: "Trajectory-based semi-autonomous grasping of a non-cooperative tumbling satellite with a free-floating robot", Chair for Intelligent Autonomous Systems, TU Darmstadt, June 2019.
- RSS 2019 Workshop Space Robotics, Freiburg, Germany, June 2019.
- Clean Space Industrial Days, ESTEC, Holland, May 2016.
- Space Robotics Symposium: Present and Future Robotics in Space Application, Technology & Innovation Centre, University of Strathclyde, Glasgow, United Kingdom, 29th-30th October 2015.
- Workshop: The Next Generation of Space Robotic Servicing Technologies, International Conference on Robotics and Automation (ICRA 2015), Seattle, Washington, USA, May 2015.
- R&T Days on Space Robotics & Automation, AIRBUS DS Space Systems, Berlin, November 2014.
- Common CoTeSys-CREATE Workshop, TUM, Garching (D), 5th October 2012.
- Cleanspace Workshop on Active Debris Removal, ESOC, September 2012.
- 2nd European Workshop on Active Debris Removal, CNES HQ, Paris (F), June 2012.
- Workshop: Robotic Satellite Servicing, International Conference on Robotics and Automation (ICRA 2012), St. Paul, Minnesota, May 2012.
- Minisymposium on Optimization in Biomechanics and Robotics, 14th Belgian-French-German Conference on Optimization, Leuven, September 14-18, 2009.
- Minisymposium on Optimal Control in Robotics and Biomechanics, 13th Czech-French-German Conference on Optimization, Heidelberg, September 17-21, 2007.
- Collision-free motion planning for dynamic systems (co-organizer), International Conference on Robotics and Automation (ICRA'07), Rome, Italy, 10th April 2007.
- Motion Planning in Virtual Environments (MOVIE), Toulouse (France), January 2005.
- On-orbit servicing of Space Infrastructure Elements via Automation Robotics Technology (OOS), Vancouver (Canada), October 2004
- On-orbit servicing of Space Infrastructure Elements via Automation Robotics Technology (OOS), Bonn (Germany), October 2002
Last updated on 18th March 2024