Mitarbeiter

Deutsches Zentrum für Luft- und Raumfahrt (DLR)
Institut für Robotik und Mechatronik
Analyse und Regelung komplexer Robotersysteme
Oberpfaffenhofen
Münchener Str. 20
82234 Weßling
| Telefon: | +49 8153 28-1306 |
| E-Mail: | Dr.-Ing. Thomas Hulin |
Thomas Hulin heads the Telemanipulation Research Group at the Institute of Robotics and Mechatronics of the German Aerospace Center (DLR). His research interests include haptics (control, devices, and algorithms), telerobotics, physical human-robot interaction, robot visualization, augmented reality, and skill transfer. He is co-author of more than 60 peer-reviewed scientific articles in international journals, books and conferences. He was granted 9 patents and is co-inventor of the robotic systems HUG and SwarmRail, and of the interaction devices CoaxHaptics, VibroTac S, and FingerTac. He has served as an Associate Editor for IEEE since 2019 (IEEE ICRA 2020 and 2021, IEEE WHC 2021, RA-L since 2021).
News
- 20.07.2022
- I am delighted to have been invited to speak at the "CRC Hybrid Societies' Summer School". I reveal how to go "Beyond Transparency in Telerobotics".
- 01.07.2022
- I am honoured being invited as a guest speaker on the RSS'22 workshop on "Toward Robot Avatars: Perspectives on the ANA Avatar XPRIZE Competition". I present our "model-augemented teleoperation"-concept and show the long journey towards this novel approach.
- 21.06.2022
- We present for the first time our mobile overhead robot SwarmRail in a live demonstration at the Automatica trade fair.
- 21.04.2022
- Our "Science Robotics" article about the telerobotics space experiment Analog-1 is now online. Enjoy reading!
- 04.01.2022
- The German TV station MDR reports in its documentary "Einfach Genial" about our telerobotic technology in the Smile project: youtu.be/Efnx9yVR9fg.
- 11.11.2021
- Our patent "Manipulator" (DE 10 2019 124 358) was granted.
- 07.09.2021
- We could give the first live demo of the augmented haptics device FingerTac at the CeTI convention in Dresden. Many thanks for the (verbal) feedback from those who tested this novel haptic interaction device.
- 25.08.2021
- I have been appointed as associate editor for the IEEE Robotics and Automation Letters (RA-L). I look forward to serving this prestigous robotics journal.
- 12.08.2021
- Our patent "Robotersystem" (DE 10 2019 124 717) was granted.
- 11.06.2021
- Our journal paper on "Model-Augmented Haptic Telemanipulation" got published at Frontiers in Robotics and AI and is freely accessible. Many thanks to the reviewers for their great support. Enjoy reading!
- 24.06.2021
- Our patent "Robotersystem" (DE 10 2020 103 303) was granted.
- 04.01.2021
- I have been appointed as associate editor for the IEEE WHC 2021. I look forward to serving the world's leading haptics conference.
- 20.09.2020
- I have been appointed as associate editor for the IEEE ICRA 2021. I look forward to serving this prestigious robotics conference.
- 14.08.2020
- We are looking for another excellent student in mechanical engineering, who wants to join our SwarmRail-Team to develop novel innovative mobile robotic platforms for the factory of the future. Further information can be found at rmc.dlr.de/swarmrail.
- 22.07.2020
- Today, I presented our new exciting augmented-haptics device FingerTac at the HCII2020. Enjoy reading the paper.
- 15.06.2020
-
It is great to see that some online news sites have reported about our SwarmRail system:
- IEEE Spectrum Video Friday
- heise online
- Robotic Gizmos
- Robot Enthusiast
- Technology in Business
- EN24 - 02.06.2020
- Martin presented our novel SwarmRail-system at the virtually held ICRA conference. Enjoy watching the SwarmRail video on youtube and reading the paper.
- 25.11.2019
-
ESA astronaut Luca Parmitano today successfully carried out a telerobotic experiment and took control of an ESA rover from the space station ISS. Our telemanipulation control framework provided stable haptic feedback during the task:
www.dlr.de/content/en/articles/news/2019/04/20191125_astronaut-controls-rover-on-earth.html - 09.10.2019
- We are looking for students who want to build a novel mobile robot platform for the factory of the future. Further information can be found at rmc.dlr.de/swarmrail.
- 16.09.2019
- It is a great honor to have been appointed as associate editor for the IEEE ICRA 2020. I look forward to supporting the world's largest robotics conference.
- 12.07.2019
- The IEEE-Spectrum included our haptic device HUG on their Video Friday.
- 10.05.2019
- The IROS-workshop on "Legacy Disruptors in Applied Telerobotics" was accepted. I will contribute with a talk on "Control Concepts for VR-Based Haptic Telemanipulation".
- 11.03.2019
- Our patent "Robotersystem" (DE102017215166) was granted.
- 26.01.2019
- Our paper on "Reconstructing Human Hand Pose and Configuration using a Fixed-Base Exoskeleton" got accepted or publication on the ICRA conference. We thank the reviewers for their valuable comments.
- 01.01.2019
- The Center for Tactile Internet (CeTI) is now alive. Looking forward to an inspiring collaboration.
- 01.10.2018
- Our paper on "Space Factory 4.0 - New processes for the robotic assembly of modular satellites on an in-orbit platform based on Industrie 4.0 approach" was presented on the International Astronautical Congress (IAC).
- 14.06.2018
- Our paper on "Inertial Properties in Haptic Devices: Non-Linear Inertia Shaping vs. Force Feedforward" got accepted for publication on the SYROCO conference. We thank the reviewers for their valuable comments.
Projects
- CeTI: Centre for Tactile Internet with Human-in-the-Loop, Cluster of Excellence at TU Dresden
- Space Factory 4.0: In-orbit factory for building small satellites (Förderkennzeichen: 50RP1712)
- STAMAS: Smart technology for artificial muscle applications in space (European Project FP7-SPACE-2012-312815)
- VR-OOS: Virtual Reality for On-Orbit Servicing
- VibroTac: A Versatile Vibrotactile Feedback Device for the Wrist
-
Haptic rendering for virtual assembly verification
Partners: VR-Lab of the Volkswagen AG, Fraunhofer IGD - EU Network of Excellence: Enactive Interfaces (European Project FP6-IST-2004-002114)
- Skills: Multimodal Interfaces for Capturing and Transfer of Skill (European Project FP6-IST-2005-035005FP6-IST-035005)
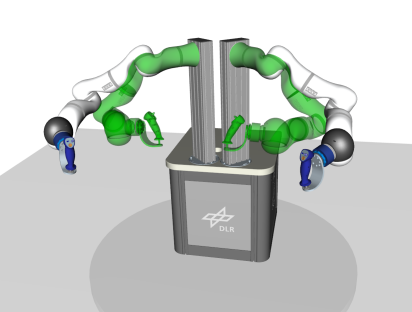
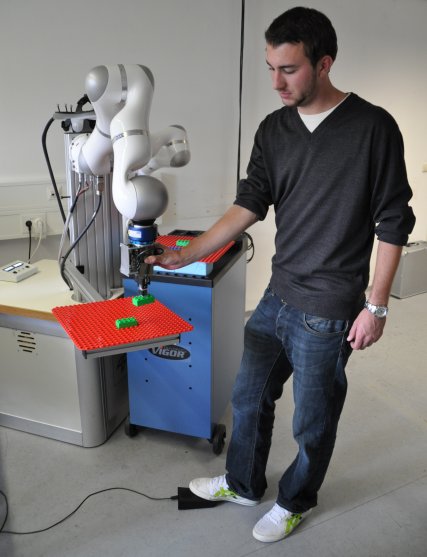
Fields of Interest
 |
 |
 |
 |
 |
 |
| Control theory for haptic rendering | Human machine interfaces (video) | Virtual product development (video) | Robot simulation and visualization | Skill transfer | Haptic rendering algorithms |
Awards
Paper Awards
- Best Paper Award in the category Virtual, Augmented and Mixed Reality, HCI International 2013, for the paper B. Weber, M. Sagardia, T. Hulin, C. Preusche: Visual, Vibrotactile, and Force Feedback of Collisions in Virtual Environments: Effects on Performance, Mental Workload and Spatial Orientation
- Short Paper Honorable Mention, IEEE VR 2012, for the paper M. Sagardia, B. Weber, T. Hulin, C. Preusche, G. Hirzinger: Evaluation of Visual and Force Feedback in Virtual Assembly Verifications
Innovation Awards
- DLR Innovation Award 2012 for the VibroTac Technology, S. Schätzle, T. Hulin, T. Ende, T. Wüsthoff, B. Weber, C. Preusche: VibroTac - A Versatile Vibrotactile Feedback Device for the Wrist awarded by the "Gesellschaft von Freunden des Deutschen Zentrums für Luft- und Raumfahrt e.V."
- M2M Challenge 2012/2013 - VibroTac is the winner in the category healthcare
- VibroTac is WT Innovation Cup finalist
Technology Transfer Awards
-
S. Schätzle, B. Weber, T. Hulin, N. Sporer: VibroTac - Tactile Access to the
World, EuRobotics Tech Transfer Award finalist 2015
In the Media
- German TV station MDR: "Einfach Genial", documentary about the Smile project: youtu.be/Efnx9yVR9fg, Jan 2022.
- Helmholtz Perspektiven: Virtual Reality - Schöne neue Wirklichkeit, Rebecca Winkels, Winter 2016/17, Jan. 2017, p. 8-13
- fondsmagazin der DekaBank: Individuelle Massenfertigung, Peter Weißenberg, 3.2016, 2016-11-04, p. 30-32
- Audi mobil: JUSTIN TIME, Peter Weißenberg, June 2016
- HYPERRAUM.TV, Wenn Mensch und Maschine eins werden, 22.10.2013
- Channel5/Gadget Show, Episode 9: DLR robotics and space institute, 29.07.2013
- Sat1-Bayern: Sondersendung - Roboter, Teil 3, 29.12.2010
- n-tv: Virtuelle Helfer im Hangar, n-tv Wissen, 31.12.2008
Patents and Patent Applications
- M. Panzirsch, T. Hulin, N. Bechtel: "Regelungsverfahren für die Teleaktuierung, Aktuatorsystem und Roboter", DE 10 2022 118 180 (patent pending)
- M. Görner, T. Hulin, R. Weitschat: "Robotorsystem", DE 10 2021 115 547 (patent pending)
- T. Hulin, M. Görner, R. Weitschat: "Omnidirektionales Rad und Robotersystem", DE 10 2020 133 383 (patent pending)
- T. Hulin, M. Görner: "Robotersystem", DE 10 2020 103 303 (granted)
- F. Grimmel, F. Benedikt, M. Görner, T. Hulin, B. Pleintinger: "Robotersystem", DE 10 2019 124 717 (granted)
- T. Hulin, B. Pleintinger: "Manipulator" DE 10 2019 124 358 (granted)
- S. Schätzle, T. Hulin: "Orientierungshilfe für eine Person mit eingeschränktem Sehvermögen" DE 10 2018 107 970 (granted)
- M. Görner, T. Hulin: "Robotersystem", DE 10 2017 215 166 (granted)
- T. Hulin: "Haptische Vorrichtung und Verfahren zur Regelung eines Aktors einer haptischen Vorrichtung", DE 10 2017 100 101 (granted)
- T. Hulin, S. Schätzle: "Vorrichtung und Verfahren zum Erzeugen eines taktilen Reizes" (Aktiver Fingerhut zur Generierung taktilen Feedbacks), DE 10 2016 111 634 (granted)
- K. Hertkorn, T. Hulin, C. Preusche: "Verfahren zum Steuern eines Roboters" (Method for controlling robot), DE 10 2012 205 279 (not granted)
- T. Hulin, S. Jörg, J. Klodmann, R. Konietschke: "Verfahren zum Steuern eines Telemanipulations-Roboters" (Method for telemanipulating a robot), EP2602681B1 (granted)
- T. Ende, T. Hulin, C. Preusche, S. Schätzle, T. Wüsthoff: "Orientierungshilfe für Personen mit eingeschränktem Sehvermögen" (Orientation aid for persons having limited visual faculty), DE 10 2011 076 891, EP2713983B1 (granted)
The last two in the list got already successfully licensed by industry in the scope of two technology transfers.
Publications
This is a chronological list of all my publications. You may also be interested in my short bio. You can also find me on Google Scholar and dblp.
2022
- M. Panzirsch, A. Pereira, H. Singh, B. Weber, E. Ferreira, A. Gherghescu, Lukas Hann, E. den Exter, F. van der Hulst, L. Gerdes, L. Cencetti, K. Wormnes, J. Grenouilleau, W. Carey, R. Balachandran, T. Hulin, C. Ott, D. Leidner, A. Albu-Schäffer, N.Y. Lii, T. Krüger: Exploring planet geology through force-feedback telemanipulation from orbit. Science Robotics, Vol 7, Issue 65, April 2022
2021
- F. Kempf, M. Mühlbauer, T. Dasbach, F. Leutert, T. Hulin, R. Balachandran, M. Wende, R. Anderl, K. Schilling, A. Albu-Schäffer: AI-In-Orbit-Factory – AI approaches for adaptive robotic in-orbit manufacturing of modular satellites. International Astronautical Congress (IAC), Dubai. IAC-21.D1.1.2, 2021
- X. Xu, H. Singh, Q. Liu, M. Panzirsch, T. Hulin, E. Steinbach: A Novel Energy Compensation Scheme for Quality Enhancement in Time-delayed Teleoperation with Multi-DoF Haptic Data Reduction and Communication. IEEE Transactions on Haptics, 2021
- T. Hulin, M. Panzirsch, H. Singh, A. Coelho, R. Balachandran, A. Pereira, B. M. Weber, N. Bechtel, C. Riecke, B. Brunner, N. Y. Lii, J. Klodmann, A. Hellings, K. Hagmann, G. Quere, A. S. Bauer, M. Sierotowicz, R. Lampariello, J. Vogel, A. Dietrich, D. Leidner, C. Ott, G. Hirzinger and A. Albu-Schäffer: Model-Augmented Haptic Telemanipulation: Concept, Retrospective Overview and Current Use-Cases, Frontiers in Robotics and AI, 2021
- M. Görner, O. Eiberger, T. Hulin, K. Nottensteiner, R. Weitschat: Forschung für die Fabrik der Zukunft - Flexibilität durch Robotik. VDI Technik in Bayern, 2021
2020
- H. Singh, M. Rothammer, C. I. Lee, T., Hulin, J. H. Ryu, C. Ott: Ensuring Stable and Transparent High Stiffness Haptic Interaction Using Successive Force Augmention with Time Domain Passivity Approach. In International Symposium on Experimental Robotics, Nov. 2020, Springer, Cham
- J. Vogel, D. Leidner, A. Hagengruber, M. Panzirsch, B. Bäuml, M. Denninger, U. Hillenbrand, L. Suchenwirth, P. Schmaus, M. Sewtz, A. Bauer, T. Hulin, M. Iskandar, G. Quere, A. Albu-Schäffer, A. Dietrich: An Ecosystem for Heterogeneous Robotic Assistants in Caregiving, IEEE Robotics & Automation Magazine, 2020
- A. Schmidt, A. Pereira, T. Baker, B. Pleintinger, T. Hulin, Z. Chen, D.A. Abbink, N.Y. Lii: Enabling Interaction with Virtual Fluids and Mixed Media using a High Dexterity Hand Exoskeleton, IEEE International Conference on Systems, Man, and Cybernetics (SMC), Oct. 2020
- T. Krueger, E. Ferreira, A. Gherghescu, L. Hann, E. den Exter, F.P.J. van der Hulst, L. Gerdes, A. Pereira, H. Singh, M. Panzirsch, T. Hulin, R. Balachandran, B. Weber, N.Y. Lii: Designing and Testing a Robotic Avatar for Space-to-Ground Teleoperation: the Developers' Insights, International Astronautical Congress (IAC), Oct. 2020
- H Beik-Mohammadi, M Kerzel, B Pleintinger, T Hulin, P Reisich, A. Schmidt, A. Pereira, S. Wermter, N.Y. Lii: Model Mediated Teleoperation with a Hand-Arm Exoskeleton in Long Time Delays Using Reinforcement Learning, IEEE International Conference on Robot and Human Interactive Communication (Ro-Man), Sep. 2020
- T. Hulin, M. Rothammer, I. Tannert, S. Subramanyam Giri, B. Pleintinger, H. Singh, B. Weber, C. Ott: FingerTac - A Wearable Tactile Thimble for Mobile Haptic Augmented Reality Applications, HCI International 2020, July 2020, Copenhagen, Denmark
- M. Görner, F. Benedikt, F. Grimmel, T. Hulin: SwarmRail: A Novel Overhead Robot System for Indoor Transport and Mobile Manipulation, IEEE ICRA 2020, May 2020, Paris, France
2019
- A. Pereira, G. Stillfried, T. Baker, A. Schmidt, A. Maier, B. Pleintinger, Z. Chen, T. Hulin, N. Y. Lii: Reconstructing Human Hand Pose and Configuration using a Fixed-Base Exoskeleton, IEEE ICRA 2019, May 2019, Montreal, Canada
2018
- T. Weber Martins, S. Kugler, R. Anderl, O. Ruf, K. Schilling, A Pereira, A. M. Giordano, R. Balachandran, F. Benedikt, T. Hulin, A. Albu-Schäffer, J. Lewis: Space Factory 4.0 - New processes for the robotic assembly of modular satellites on an in-orbit platform based on "Industrie 4.0" approach, International Astronautical Congress (IAC), Oct. 2018
- S. Schätzle, T. Hulin, B. Pleintinger: VibroTac S: an electronic assistive device for blind and visually impaired people to avoid collisions, International Conference on Human Systems Engineering and Design (IHSED), Oct. 2018
- S. Fahmi, T. Hulin: Inertial Properties in Haptic Devices: Non-Linear Inertia Shaping vs. Force Feedforward, SYROCO, Aug. 2018
- M. Sagardia, A. Martín, T. Hulin: Realtime Collision Avoidance for Mechanisms with Complex Geometries (Video), IEEE VR, Mar. 2018
2017
- M. Sagardia, T. Hulin: Multimodal Evaluation of the Differences between Real and Virtual Assemblies, IEEE Transactions on Haptics (ToH), Aug. 2017
- T. Hulin: A Practically Linear Relation between Time Delay and the Optimal Settling Time of a Haptic Device, IEEE Robotics and Automation Letters (RA-L) & IEEE ICRA 2017, May 2017, Singapore [ PDF ]
- T. Hulin: Control of Hybrid Systems Affected by Time Delay with Application in Haptic Rendering, Dissertation, Leibniz Universität Hannover, April 2017 [ online preview ] [ draft version ]
- M. Sagardia, T. Hulin: Evaluation of a Penalty and a Constraint-Based Haptic Rendering Algorithm with Different Haptic Interfaces and Stiffness Values, IEEE VR 2017, Mar. 2017, Los Angeles, California, USA (see also the corresponding video at vimeo.com)
2016
- T. Hulin: Haptisches Feedback verspricht den nächsten Hype um die virtuelle Realität auszulösen (Gastbeitrag), Blog of the innovation congress, Management Circle, Nov. 2016, Munich, Germany
- M. Sagardia, T. Hulin, K. Hertkorn, P. Kremer, S. Schätzle: A Platform for Bimanual Virtual Assembly Training with Haptic Feedback in Large Multi-Object Environments, ACM VRST 2016, Nov. 2016, Munich, Germany
- M. Sagardia, T. Hulin: A Fast and Robust Six-DoF God Object Heuristic for Haptic Rendering of Complex Models with Friction, ACM VRST 2016, Nov. 2016, Munich, Germany
- M. Panzirsch, T. Hulin, J. Artigas, C. Ott, M. Ferre: Integrating Measured Force Feedback in Passive Multilateral Teleoperation, EuroHaptics, July 2016, London, UK
2015
- R. González Camarero, T. Hulin, B. Vodermayer: The STAMAS Simulator: A Kinematics and Dynamics Simulator for an Astronaut's Leg and Hand Exoskeleton, STAMAS Workshop - Smart technology for artificial muscle applications in space, Oct. 2015, Madrid, Spain [ PDF ]
- T. Hulin, C. Alessandro, B. Vodermayer, R. Riener: Evaluation of Force Feedforward Control for Actuators with Limited Dynamics and Time Delay, STAMAS Workshop - Smart technology for artificial muscle applications in space, Oct. 2015, Madrid, Spain [ PDF ]
- M. Sagardia, K. Hertkorn, T. Hulin, S. Schätzle, R. Wolff, J. Hummel, J. Dodiya, A. Gerndt: VR-OOS: The DLR's Virtual Reality Simulator for Telerobotic On-Orbit Servicing with Haptic Feedback, IEEE Aerospace Conference, March 2015, Big Sky, Montana, USA [ PDF ]
2014
- T. Hulin, A. Albu-Schäffer, G. Hirzinger: Passivity and Stability Boundaries for Haptic Systems with Time Delay, IEEE Transactions on Control Systems Technology, July 2014 [ PDF ]
- A. Gerndt, J. Dodiya, K. Hertkorn, T. Hulin, J. Hummel, M. Sagardia, R. Wolff: Fallbeispiele für VR/AR - Virtuelle Satellitenreparatur im Orbit, In: R. Dörner, W. Broll, P. Grimm, B. Jung (Eds.), Virtual und Augmented Reality (VR / AR) - Grundlagen und Methoden der Virtuellen und Augmentierten Realität, Springer Berlin Heidelberg, Feb. 2014
2013
- T. Hulin, R. González, A. Albu-Schäffer: Optimal Control for Haptic Rendering: Fast Energy Dissipation and Minimum Overshoot, IROS2013, Nov. 2013, Tokyo, Japan
- B. Weber, M. Sagardia, T. Hulin, C. Preusche: Visual, Vibrotactile, and Force Feedback of Collisions in Virtual Environments: Effects on Performance, Mental Workload and Spatial Orientation, HCI International, July 2013, Las Vegas, Nevada, USA (Award: Best VAMR 2013 Paper Award)
- M. Sagardia, K. Hertkorn, T. Hulin, R. Wolff, J. Hummel, J. Dodiya, A. Gerndt: An Interactive Virtual Reality System for On-Orbit Servicing (Video), IEEE VR 2013, Mar. 2013, Orlando, Florida, USA
- M. Sagardia, T. Hulin: Fast and Accurate Distance, Penetration, and Collision Queries Using Point-Sphere Trees and Distance Fields , ACM SIGGRAPH, Jul. 2013, Anaheim, California, USA
2012
- T. Hulin, K. Hertkorn, C. Preusche: Interactive Features for Robot Viewers, ICIRA 2012, Oct. 2012, Montreal, Quebec, Canada
- V. Schmirgel, U.E. Zimmermann, E. Yechiam, A. Telpaz, T. Hulin, C. Preusche: Training Approaches for Improving Robot Programming-by-Demonstration Skills, Skill Training in Multimodal Virtual Environments, Book Chapter, Editor: M. Bergamasco, B. Bardy, D. Gopher, CRC Press, Sep. 2012
- M. Sagardia, B. Weber, T. Hulin, C. Preusche, G. Hirzinger: Evaluation of Visual and Force Feedback in Virtual Assembly Verifications, IEEE VR 2012, March 2012, Orange Country, CA, USA (Award: Short Paper, Honorable Mention)
2011
- T. Hulin, C. Preusche, E. Yechiam, A. Telpaz, V. Schmirgel, U.E. Zimmermann: Haptic and Visual Training of System Behavior – a Case Study for Robotic Programming-by-Demonstration. The International SKILLS Conference 2011, BIO Web of Conferences. DOI: 10.1051/bioconf/20110100039, 15.-16. Dec. 2011, Montpellier, France
- G. Evreinov, R. Raisamo, T. Hulin, U.E. Zimmermann: PbD: Visual Guidance for Robot-Arm Manipulation. The International SKILLS Conference 2011, BIO Web of Conferences. DOI: 10.1051/bioconf/20110100023, 15.-16. Dec. 2011, Montpellier, France
- B. Weber, S. Schätzle, T. Hulin, C. Preusche, B. Deml: Evaluation of a Vibrotactile Feedback Device for Spatial Guidance, WorldHaptics Conference (WHC) 2011, June 2011, Istanbul, Turkey
- T. Hulin, K. Hertkorn, P. Kremer, S. Schätzle, J. Artigas, M. Sagardia, F. Zacharias, C. Preusche: The DLR Bimanual Haptic Device with Optimized Workspace (Video), ICRA2011, May 2011, Shanghai, China
2010
- R. Weller, D. Mainzer, G. Zachmann, M. Sagardia, T. Hulin, C. Preusche: A Benchmarking Suite for 6-DOF Real Time Collision Response Algorithms, Proceedings of the 17th ACM Symposium on Virtual Reality Software and Technology 2010 (VRST' 2010), Nov. 2010, Hong Kong, China
- F. Zacharias, I.S. Howard, T. Hulin, G. Hirzinger: Workspace Comparisons of Setup Configurations for Human-Robot Interaction, IROS2010, Oct. 2010, Taipei, Taiwan
- T. Hulin, V. Schmirgel, E. Yechiam, U.E. Zimmermann, C. Preusche, G. Pöhler: Evaluating Exemplary Training Accelerators for Programming-by-Demonstration, in 19th IEEE International Symposium on Robot and Human Interactive Communication (Ro-Man 2010), Sep. 2010, Viareggio, Italy
- I. Diaz, J.J. Gil, T. Hulin: Stability Boundary and Transparency for Haptic Rendering, Advances in Haptics, Mehrdad Hosseini Zadeh (Ed.), ISBN: 978-953-307-093-3, INTECH, 2010, Available from: sciyo.com/articles/show/title/stability-boundary-and-transparency-for-haptic-rendering
- K. Hertkorn, T. Hulin, P. Kremer, C. Preusche, G. Hirzinger: Time Domain Passivity Control for Multi-Degree of Freedom Haptic Systems with Time Delay, ICRA2010, May 2010, Alaska, USA
2009
- V. Schmirgel, U.E. Zimmermann, E. Yechiam, T. Hulin, C. Preusche: Comprehension of Operating a Robot by Enactive Learning: Exemplary Approaches with Programming-by-Demonstration, in SKILLS09 International Conference on Multimodal Interfaces for Skills Transfer, Dec. 2009, Bilbao, Spain
- M. Sagardia, T. Hulin, C. Preusche, G. Hirzinger: A Benchmark of Force Quality in Haptic Rendering, HCI International 2009, July 2009, San Diego, CA, USA
- J.J. Gil, E. Sanchez, T. Hulin, C. Preusche, G. Hirzinger: Stability Boundary for Haptic Rendering: Influence of Damping and Delay, Journal of Computing and Information Science in Engineering, Volume 9, Issue 1, Mar. 2009
2008
- T. Hulin, M. Sagardia, J. Artigas, S. Schätzle, P. Kremer, C. Preusche: Human-Scale Bimanual Haptic Interface, Enactive08, Nov. 2008, Pisa, Italy
- C. Preusche, T. Hulin, G. Hirzinger: Human Haptic Perception: Basics and Applications, chapter 33: Haptic rendering and control. Birkhäuser Basel, 1st edition, pages 411-426, Oct. 2008
- M. Sagardia, T. Hulin, C. Preusche, G. Hirzinger: Improvements of the Voxmap PointShell Algorithm – Fast Generation of Haptic Data Structures, 53rd IWK – Internationales Wissenschaftliches Kolloquium, Sep. 2008, Ilmenau, Germany
- T. Hulin, C. Preusche, G. Hirzinger: Stability Boundary for Haptic Rendering: Influence of Human Operator, IROS2008, Sep. 2008, Nice, France
2007
- V. Schmirgel, U.E. Zimmermann, T. Hulin, C. Preusche: Position Paper: Human Skills for Programming-by-Demonstration of Robots, beyond movement, Dec. 2007, Pisa, Italy
- T. Hulin, P. Kremer, R. Scheibe, S. Schätzle, C. Preusche: Evaluating Two Novel Tactile Feedback Devices, Enactive/07, Nov. 2007, Grenoble, France
- J.J. Gil, E. Sanchez, T. Hulin, C. Preusche, G. Hirzinger: Stability Boundary for Haptic Rendering: Influence of Damping and Delay, ICRA2007, April 2007, Rome, Italy
2006
- T. Hulin, J.J. Gil, E. Sanchez, C. Preusche, G. Hirzinger: Experimental Stability Analysis of a Haptic System, Enactive/06, Nov. 2006, Montpellier, France
- T. Hulin, C. Preusche, G. Hirzinger: Stability Boundary for Haptic Rendering: Influence of Physical Damping, IROS2006, Oct. 2006, Beijing, China
- N. Bajcinca, T. Hulin: Menge aller robust stabilisierenden PID-Regler: Methodik und Software (Teil III), Automatisierungstechnik, Oct. 2006
- T. Hulin, C. Preusche, G. Hirzinger: Stability Boundary and Design Criteria for Haptic Rendering of Virtual Walls, Syroco, Sep. 2006, Bologna, Italy
- S. Schätzle, T. Hulin, C. Preusche, G. Hirzinger: Evaluation of Vibro-Tactile Feedback to the Human Arm, EuroHaptics, July 2006, Paris, France
- N. Bajcinca, T. Hulin: Menge aller robust stabilisierenden PID-Regler: Methodik und Software (Teil II), Automatisierungstechnik, May 2006
2005
- N. Bajcinca, T. Hulin: RobSin: Software-Werkzeug zum Entwurf robuster PID-Regler, internal report: DLR-IB 515-2005/18, Dec. 2005
- N. Bajcinca, T. Hulin: Menge aller robust stabilisierenden PID-Regler: Methodik und Software (Teil I), Automatisierungstechnik, Nov. 2005
- T. Hulin, C. Preusche, G. Hirzinger: Haptic Rendering for Virtual Assembly Verification (Poster), WorldHaptics Conference 2005, Mar. 2005, Pisa, Italy [ PDF ]
2004
- N. Bajcinca, T. Hulin: RobSin: A New Tool for Robust Design of PID and Three-Term Controllers Based on Singular Frequencies, Proc. of CACSD/ISIC/CCA 2004, Sep. 2004, Taipei, Taiwan
2003
- T. Hulin: Software-Werkzeug zur Auslegung von robusten PID-Reglern, diploma thesis, Sep. 2003, Munich, Germany [ PDF ]
Copyright Notice:
This material is presented to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All persons copying this information are expected to adhere to the terms and constraints invoked by each author's copyright. In most cases, these works may not be reposted without the explicit permission of the copyright holder.
Supervised Theses
- Tjark Jonas Welter:
Development of a Multisensory Saddle as Input Device for Teleoperation
Bachelor's. Jade University of Applied Sciences, 2023. [elib] - Thomas Löw:
Performance Measures for Bilateral Telemanipulation
Bachelor's. Munich University of Applied Sciences, 2022. [elib] - Premankur Banerjee:
ViESTac: A Multimodal VR Evaluation Suite for Novel Tactile Devices
Master's. Technische Universität München, 2021. [elib] - Michael Rothammer:
Modeling, Observing and Controlling a Cable-Suspended Aerial Manipulator as a Constrained System
Master's. Technical University of Munich (TUM), 2021. [elib] - Hüseyin Tugcan Dinc:
Development of a Parallel Spherical Robotic Mechanism as a Haptic Interaction Device for Telerobotic Applications
Master's. Deggendorf Institute of Technology, 2020. [elib] - Michael Rothammer:
Enhancement of a control approach to display high stiffness in virtual environments
Bachelor's. Technische Universität München, 2020. [elib] - Suraj Giri:
Development of a Tactile Thimble for Augmented and Virtual Reality Applications
Master's. Universität Siegen, 2019. [elib] - Ferdinand Grimmel:
Programmierung eines Mikrocontrollers zur Ansteuerung mobiler robotischer Einheiten für das SwarmRail-System
Bachelor's. Hochschule für angewandte Wissenschaften München, 2019. [elib] - Fabian Benedikt:
Konzeption und Konstruktion einer mobilen robotischen Einheit für das SwarmRail-System
Bachelor's. Hochschule für angewandte Wissenschaften München, 2019. [elib] - Ricardo González Camarero:
Dynamic Simulation and Control of Exoskeletal Devices for an Astronaut’s Hand and Leg
Master's. CEIT and TECNUN, University of Navarra, 2014. [elib] - Alejandro Erick Magana Flores:
Stability Analysis for a Surgical Simulator
Diploma. Technische Universität Dresden, 2013. [elib] - Johannes Munk:
Rotational Drive Unit for the DLR bimanual Haptic Device - Integration of Safety Features
Technical University of Munich, 2013. [elib] - Martin Arbesmeier:
Development of a Multimodal Interface for Teleoperating a Humanoid Robot for Remote Service Tasks
Master's. Universität Regensburg, 2012. [elib] - Gloria Pöhler:
Evaluierung eines VR Systems zum Erlernen von Roboter-Singularitäten
Bachelor's. DLR, 2010. [elib] - Katharina Hertkorn:
Erweiterung eines passivitätsbasierten Reglers für haptisches Rendering
Diploma. Universität Stuttgart, 2009. [elib] - Mikel Sagardia:
Enhancements of the Voxmap-PointShell Algorithm
Diploma. Universidad de Navarra, Spain, 2008. [elib] - Zhongyang Wu:
Adaption of the Inverse Kinematics of the DLR Light Weight Robot for Its Use as Haptic Device
Master's. 2007. [elib] - Martin Otterbach:
Software-Werkzeug zur Diskretierung virtueller 3D-Objekte
Diploma. FH Esslingen, 2005. [elib]
If you also would like to work for your thesis at DLR under my supervision, please feel free to send me your application letter.
Service and Volunteer Activities
Functions
- Associate Editor (AE) of the IEEE Robotics and Automation Letters (RA-L) since Aug. 2021
- Associate Editor (AE) of the IEEE ICRA 2020 and ICRA 2021
- Associate Editor (AE) of the IEEE WHC 2021
- Co-organizer of the IEEE WHC 2017 half-day workshop on "Haptic Methods and Technologies for Virtual Assembly Simulations", speakers: Ralf Rabätje (vr-on), Jérôme Perret (haption), Rene Weller (University of Bremen), Bernhard.Weber (DLR), Thomas Hulin (DLR)
- Organizer of the IEEE WHC 2017 lab tour at DLR
- Member of the Programme Committee of the GI VR/AR 2015 and 2016
- Member of the editorial board for the Institute website (since 2013)
Invited Peer-Reviewer for
- IEEE Transactions on Robotics (T-RO)
- IEEE Transactions on Control Systems Technology (TCST)
- IEEE Transactions on Haptics (ToH)
- IEEE Transactions on Mechatronics (TMECH)
- IEEE Robotics and Automation Letters (RA-L)
- International Journal of Robotics Research
- Advances in Engineering Software
- numerous international conferences and symposia in the fields of robotics, control, haptics, virtual reality, mechatronics, and mathematical modelling.