Staff

DLR German Aerospace Center
Institute of Robotics and Mechatronics
I am a research scientist at the Institute of Robotics and Mechatronics, the German Aerospace Center (DLR) since 11.2017. In 12.2020, I started an external PhD at the Karlsruhe Institute of Technology (KIT). My advisors are Prof. Tamim Asfour (KIT) and Prof. Rudolph Triebel (DLR & TU Munich). Previously, I completed my MSc in robotics, systems and control at ETH Zurich and BSc in aerospace engineering at TU Delft. I was born in South Korea, but I also grew up in Hyderabad, India and Dublin, Ireland. I made my media debut by fishing drones.
My research aims to create robots with introspective capabilities, i.e., an intrinsic understanding of their own limitations, failures and shortcomings. Once equipped with an awareness about their own failures and limitations, robots will be able to avoid catastrophic effects by modifying their own behavior towards safety. This will lead to more explainable Artificial Intelligence and more reliable robotic systems for wider industrial deployments.
Research Interests: Field Robotics / Probabilistic Robotics / Bayesian Deep Learning.
Do not hesitate to contact me (email: This email address is being protected from spambots. You need JavaScript enabled to view it.).
Google Scholar / Linkedin
/ Linkedin / Twitter
/ Twitter
Recent News!
![]() [08.2023] Our work on SPIRIT was featured on IEEE video friday. Check out these links: Link 1 & Link 2.
[08.2023] Our work on SPIRIT was featured on IEEE video friday. Check out these links: Link 1 & Link 2.
![]() [06.2023] We got KUKA Innovation Award Finalist 2023. Check out these links: Link 1 & Link 2.
[06.2023] We got KUKA Innovation Award Finalist 2023. Check out these links: Link 1 & Link 2.
![]() [05.2023] Our RA-L2023 paper was on Helmholtz AI news-feed. Check out this link: Link.
[05.2023] Our RA-L2023 paper was on Helmholtz AI news-feed. Check out this link: Link.
![]() [04.2023] We were interviewed by the EU RIMA. Check out these links: Link 1 & Link 2.
[04.2023] We were interviewed by the EU RIMA. Check out these links: Link 1 & Link 2.
![]() [11.2022] Our research on aerial manipulation was featured at the ProRobots channel. Check out this Link.
[11.2022] Our research on aerial manipulation was featured at the ProRobots channel. Check out this Link.
![]() [10.2022] We are organizing an IROS 2022 workshop "Probabilistic Robotics in the Age of Deep Learning".
[10.2022] We are organizing an IROS 2022 workshop "Probabilistic Robotics in the Age of Deep Learning".
Research
For a complete list of my publications, check out my google scholar profile.
 |
Learning Fluid Flow Visualizations from In-Flight Images with Tufts Jongseok Lee*, Jurrien Olsman* and Rudolph Triebel. RAL 2023. *equal contributions |
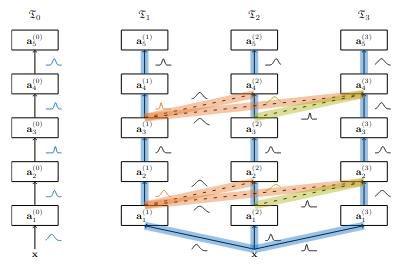 |
Learning Expressive Priors for Generalization and Uncertainty Estimation in Neural Networks Dominik Schnaus*, Jongseok Lee*, Daniel Cremers and Rudolph Triebel. ICML 2023. *equal contributions |
 |
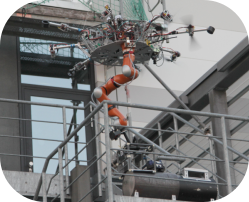
Virtual Reality via Object Poses and Active Learning: Realizing Telepresence Robots with Aerial Manipulation Capabiltiies Jongseok Lee, Ribin Balachandran, Konstantin Kondak, Andre Coelho, Marco De Stefano, Matthias Humt, Jianxiang Feng, Tamim Asfour and Rudolph Triebel. Field Robotics 2023. |
 |
Trust Your Robots! Predictive Uncertainty Estimation of Neural Networks with Sparse Gaussian Processes Jongseok Lee, Jianxiang Feng, Matthias Humt, Marcus G. Müller and Rudolph Triebel. CoRL 2021. |
 |
Estimating Model Uncertainty of Neural Networks in Sparse Information Form Jongseok Lee, Matthias Humt, Jianxiang Feng and Rudolph Triebel. ICML 2020. |
 |
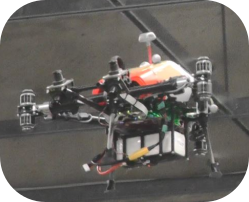
Visual-Inertial Telepresence for Aerial Manipulation Jongseok Lee, Ribin Balachandran, Yuri S. Sarkisov, Marco De Stefano, Andre Coelho, Kashmira Shinde, Min Jun Kim, Rudolph Triebel and Konstantin Kondak. ICRA 2020. |
 |
Towards Autonomous Stratospheric Flight: A Generic Global System Identification Framework for Fixed-Wing Platforms Jongseok Lee, Tin Muskardin, Cristina Ruiz Paez, Philipp Oettershagen, Thomas Stastny, Inkyu Sa, Roland Siegwart and Konstantin Kondak. IROS 2018. |




Misc
-
Slides I created for introduction to Bayesian Neural Networks.

- Blog posts from 2015 about building a smart phone controlled drone with an OpenCM board. Link